About
Hi! My name is Jin Wang. I am a third-year Ph. D. student in Bioengineering and Robotics at Italian Institute of Technology (IIT), advised by Nikos Tsagarakis as part of the Humanoids and Human Centered Mechatronics (HHCM) lab. I am currently a visiting researcher at the Oxford Robotics Institute, DRS-C lab, working with Ioannis Havoutis. My research interests lie in humanoids, embodied AI and robot learning. More specifically, I’m focusing on autonomous robotic loco-manipulation, integrating foundation models into robot tasks and improving autonomy through learning.
I am deeply committed to cross-disciplinary teamwork, leveraging engineering mindsets to address real-world challenges. And I’m passionate about novel robotic design and exploring the intelligence and potential value of robots.
Previously, I was a Master student in Robotics at LIRMM CNRS, France. I received my B.A. in Robotics Union Academy Guangdong-HongKong at GDUT.
News 📰
- [Jul, 2025] I’m starting a new position as Visiting Researcher at Oxford Robotics Institute, University of Oxford.🧑🏼🎓
- [May, 2025] Our IROS 2025 Workshop proposal Embodied AI and Robotics for Future Scientific Discovery has been accepted!🎉
- [Nov, 2024] One paper accepted by WCBM Workshop at CoRL 2024. 📃
- [Oct, 2024] Invited talks by ZHIDX Frontiers of Embodied AI Lecture. 💬
- [Sep, 2024] HYPERmotion is accepted by CoRL 2024. 🎉
- [Aug, 2024] One paper accepted by ICRA@40. 📃
- [Jul, 2024] One paper accepted by IROS 2024 for an oral presentation. ✨
- [Jul, 2023] Summer school ‘Learning-based MPC’ at ETHz 🚡
Research
Featured Publications
Thinking-with-Memory: Empowering Robots with Transferable Embodied Cognition
Jin Wang, Nikos Tsagarakis
Under Review
Information-Theoretic Graph Fusion with Vision-Language-Action Model for Policy Reasoning and Dual Robotic Control
Shunlei Li, Longsen Gao, Jin Wang, Chang Che, Xi Xiao, Jiuwen Cao, et.a
Information Fusion (To appear)
Autonomous Behavior Planning For Humanoid Loco-manipulation Through Grounded Language Model
Jin Wang, Arturo Laurenzi, Nikos Tsagarakis
International Conference on Intelligent Robots and Systems (IROS 2024) Oral
Grounding Language Models in Autonomous Loco-manipulation Tasks
Jin Wang, Nikos Tsagarakis
International Conference on Robotics and AutomationICRA@40
Project
Visual-Language-Policy Model
I trained a Vision-Language-Policy model to generate and update policies for dynamic robotic task planning. 
AURORA: Autonomous Robotic Reactive Adaptation
We empowered robots with the ability to utilize episodic memory to guide their manipulation tasks in new scenario with grounded multi-modal foundation models. 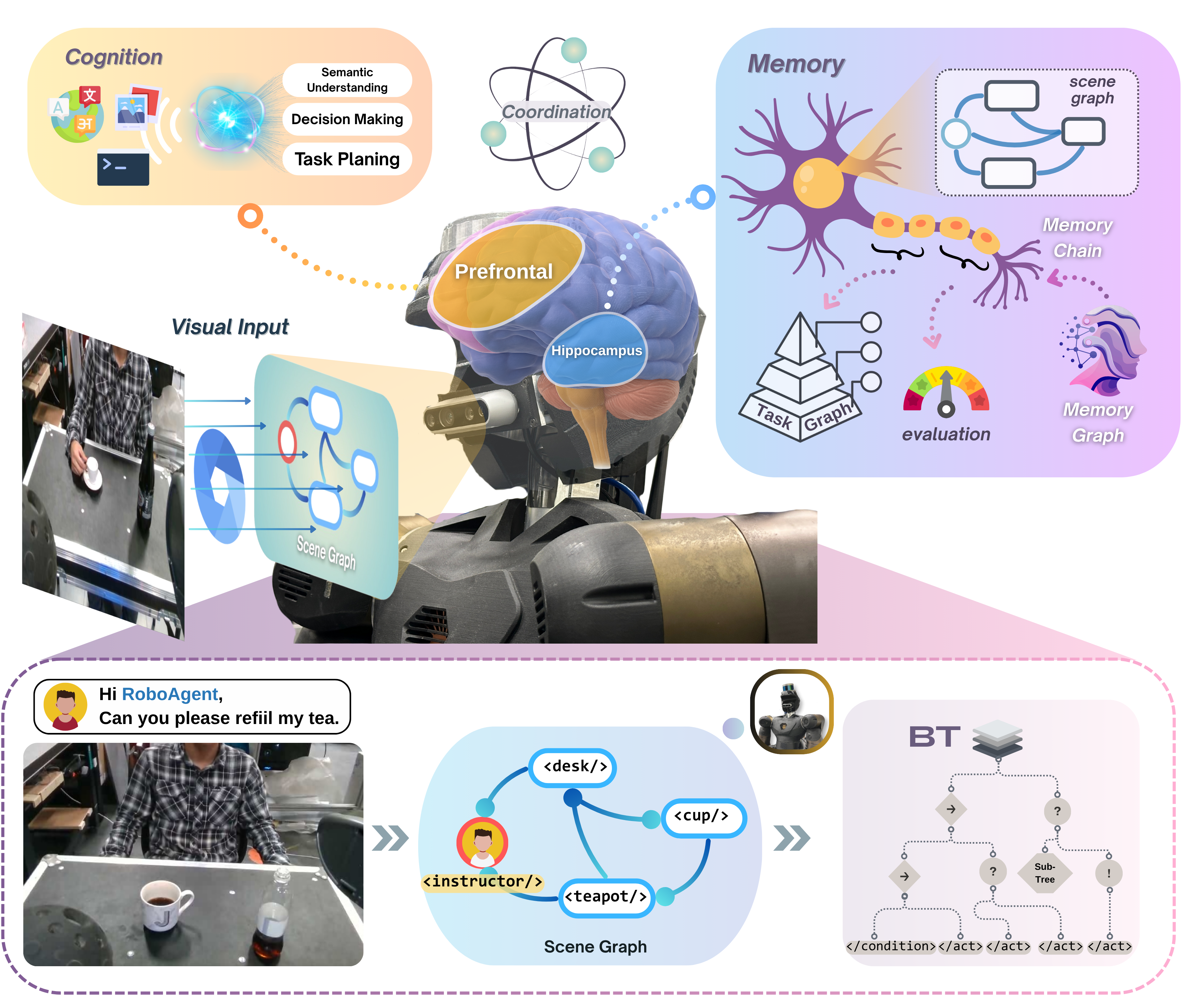
INTENTION
We enable robots to guide manipulation actions through interactive intuition without requiring verbal commands.
